








Jualan panas sistem gerakan simulator 6 DOF
Platform gerakan 6DOF kami boleh mensimulasikan pelbagai pose gerakan spatial dan boleh digunakan secara meluas untuk pelbagai simulator latihan seperti simulator penerbangan, simulator kapal tentera laut, platform simulasi berlepas dan mendarat helikopter tentera laut, simulator kereta kebal, simulator memandu kereta dan memandu kereta api. simulator dan filem dinamik, peralatan hiburan dan sebagainya.

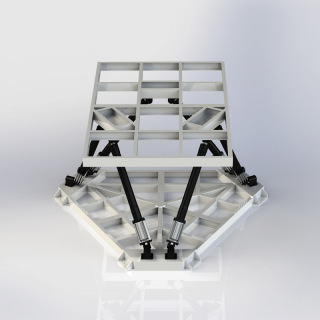
Ciri-ciri platform gerakan 6 DOF:
1. Diperbuat daripada keluli yang mempunyai rupa yang cantik, struktur yang padat, bunyi yang rendah dan mudah diselenggara.
2. Sistem servo dengan kawalan digital penuh digunakan untuk kawalan yang tepat, pergerakan platform lancar dan berterusan, juga dengan tindak balas berkelajuan tinggi yang cepat dan operasi berkelajuan rendah yang stabil.
3. Mengguna pakai sendi bola khusus kami sendiri bagi robot selari, lejang maksimumnya boleh mencapai 35° dengan ketepatan tinggi.
4. Silinder elektrik menggunakan struktur bersambung terus baharu dengan motor dibina di dalamnya yang boleh menjadikannya cukup padat. Sementara itu, skru ketepatan ultra senyap juga digunakan dalam silinder dengan bunyi yang sangat rendah.
5. Semua blok condong disiapkan di pusat pemesinan yang boleh memastikan ketepatan kedudukan setiap sisi.
6. Menggunakan kad kawalan yang dibangunkan sendiri, ia menyepadukan pelbagai model data platform 6 DOF dan model algoritma, ia boleh melaksanakan operasi matematik yang sepadan dengan menerima tarikh pose dari komputer atas, dan kemudian mengira lejang enam silinder. Ia juga boleh melaraskan kelembutan dan kelajuan operasi platform juga.
Spesifikasi Utama:
Prestasi sistem
Postur badan Unit Amplitud Halaju Heave mm ±500 200mm/s Lonjakan mm ±400 200mm/s Bergoyang mm ±400 200mm/s Pitch ° ±30 10°/s Gulung ° ±30 10°/s Yaw ° ±30 10°/s
Spesifikasi muatan
| Berat produk | 5021 kg |
| Muatan | 4000 kg |
Dimensi produk
| Panjang | 5000 mm |
| Lebar | 3000 mm |
| Ketinggian Min | 2670 mm |
Keperluan kuasa
| Bekalan kuasa | 380V tiga fasa |
| Sambungan | Ethernet |
Sistem kawalan (kabinet elektrik)

Sistem kawalan: perisian kawalan terbenam berjalan pada pengawal utama, dan pengawal gerakan menggunakan pengawal gerakan bas berprestasi tinggi Gugao, dan menggunakan algoritma kinematik hadapan dan songsang yang dibangunkan secara bebas oleh syarikat kami untuk merealisasikan kawalan gerakan enam darjah -platform gerakan kebebasan.
Perisian kawalan termasuk tetapi tidak terhad kepada modul fungsi berikut: modul fungsi pemeriksaan kendiri sistem, modul fungsi sambungan rangkaian, modul fungsi konfigurasi parameter, modul fungsi mesin keadaan, modul fungsi prapemprosesan data, modul fungsi perancangan trajektori, modul fungsi pengiraan kinematik , modul fungsi komunikasi bas, modul fungsi I/O digital, modul fungsi maklum balas keadaan, modul fungsi penggera kerosakan dan modul fungsi keselamatan.
Perisian kawalan menyediakan antara muka pembangunan sekunder dan membuka antara muka komunikasi dan protokol kepada Parti A. Platform enam darjah kebebasan berjalan lancar, lancar dan tanpa tersandung. Algoritma kinematik ke hadapan dan songsang menyuap semula sikap platform atau data kedudukan silinder elektrik dalam masa nyata. Algoritma ini mempunyai fungsi perlindungan keselamatan dalaman untuk platform, yang tidak akan menyebabkan kerosakan pada platform jika pengguna tersilap memasukkan data!




