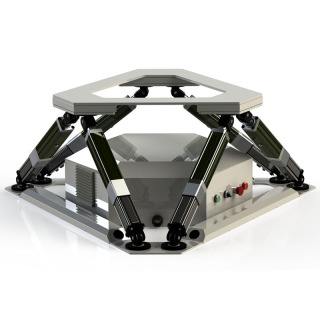
Pangkalan gerakan simulator memandu kereta
Pangkalan gerakan digunakan secara meluas dalam pelbagai simulator latihan, seperti simulator penerbangan, simulator kapal, platform simulasi berlepas dan mendarat helikopter tentera laut, simulator kereta kebal, simulator memandu kereta, simulator memandu kereta api, simulator gempa bumi, filem dinamik, peralatan hiburan dan bidang lain. , dan juga dalam dok kapal angkasa dan dok mengisi minyak kapal tangki udara; Peralatan hiburan budaya, peralatan pengalaman hiburan interaktif baharu, simulasi kejuruteraan, penilaian reka bentuk, ujian, eksperimen, latihan tugas, penilaian latihan, simulasi alam sekitar, pengulangan acara, dsb.
Spesifikasi Utama:
Prestasi sistem
Postur badan Unit Amplitud Halaju Heave mm ±160 375mm/s Lonjakan mm ±160 375mm/s Bergoyang mm ±160 375mm/s Pitch ° ±16 15°/s Gulung ° ±16 15°/s Yaw ° ±16 15°/s
Spesifikasi muatan
| Berat produk | 349 kg |
| Muatan | 1000 kg |
Dimensi produk
| Panjang | 2000 mm |
| Lebar | 1515 mm |
| Ketinggian Min | 780 mm |
Keperluan kuasa
| Bekalan kuasa | 380V tiga fasa |
| Sambungan | Ethernet |
Sistem kawalan (kabinet elektrik)

Sistem kawalan: perisian kawalan terbenam berjalan pada pengawal utama, dan pengawal gerakan menggunakan pengawal gerakan bas berprestasi tinggi Gugao, dan menggunakan algoritma kinematik hadapan dan songsang yang dibangunkan secara bebas oleh syarikat kami untuk merealisasikan kawalan gerakan enam darjah -platform gerakan kebebasan.
Perisian kawalan termasuk tetapi tidak terhad kepada modul fungsi berikut: modul fungsi pemeriksaan kendiri sistem, modul fungsi sambungan rangkaian, modul fungsi konfigurasi parameter, modul fungsi mesin keadaan, modul fungsi prapemprosesan data, modul fungsi perancangan trajektori, modul fungsi pengiraan kinematik , modul fungsi komunikasi bas, modul fungsi I/O digital, modul fungsi maklum balas keadaan, modul fungsi penggera kerosakan dan modul fungsi keselamatan.
Perisian kawalan menyediakan antara muka pembangunan sekunder dan membuka antara muka komunikasi dan protokol kepada Parti A. Platform enam darjah kebebasan berjalan lancar, lancar dan tanpa tersandung. Algoritma kinematik hadapan dan songsang menyuap semula sikap platform atau data kedudukan silinder elektrik dalam masa nyata. Algoritma ini mempunyai fungsi perlindungan keselamatan dalaman untuk platform, yang tidak akan menyebabkan kerosakan pada platform jika pengguna tersilap memasukkan data!